只靠触觉,哥伦比亚大学研发出可在黑暗中操作的高灵巧度机器手

这种机器手有五个手指,每个手指都配备了先进的光学触觉传感器,能够精确地定位接触点,并覆盖复杂的曲面。每个手指有三个独立的关节,可以灵活地调整姿态。为了测试机器手的灵巧性,研究人员选择了一个难度很高的操纵任务:让机器手在保持物体稳定的同时,任意地旋转物体。这个任务需要不断地重新调整部分手指的位置,而其他手指则要固定物体。
令人惊讶的是,机器手不依赖任何视觉反馈,只根据触觉传感器和自身位置的数据完成了这个任务。这意味着机器手可以在非常差的光线条件下进行操作,甚至可以在黑暗中工作。研究人员表示,这种基于触觉的灵巧性将为自动化操作在现实世界中开辟全新的应用场景,比如物流、材料处理、高级制造和装配等领域。
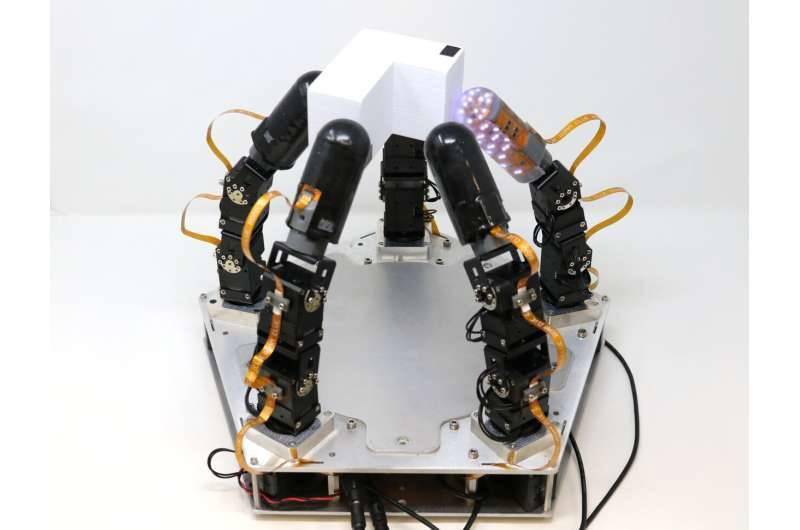
一个配备了五个触觉手指的灵巧的机器手
为了让机器手学会这种操纵技能,研究人员使用了一种叫做深度强化学习的方法,它可以让机器人通过实践来学习新的物理任务。研究人员还开发了一些新的算法来有效地探索可能的操纵策略。他们利用模拟器作为训练场,在几个小时内完成了相当于一年的练习。然后,他们将模拟器中训练好的技能转移到真实的机器手上,成功地实现了他们期望的灵巧性。
哥伦比亚大学的马特伊・乔卡利教授说:“虽然我们展示的是一个概念验证性质的任务,但我们相信这种灵巧性将为自动化操作在现实世界中带来全新的可能性。一些更直接的用途可能是在物流和材料处理方面,帮助缓解近年来困扰我们经济的供应链问题,在工厂中进行高级制造和装配。”
乔卡利教授表示,机器人领域的最终目标是在家庭中实现辅助性的机器人,这是真正检验灵巧性的试金石。他说:“在这项研究中,我们展示了机器手也可以仅仅基于触觉来实现高度灵巧性。一旦我们把视觉反馈和触觉结合起来,我们希望能够实现更高的灵巧性,有朝一日能够接近复制人手的功能。”
乔卡利教授指出,一个在现实世界中有用的物理机器人需要同时具备抽象的语义智能(IT之家注:能够概念性地理解世界的运作)和具身智能(能够物理地与世界互动)。像 OpenAI 的 GPT-4 或谷歌的 PALM 这样的大型语言模型旨在提供前者,而像这项研究中实现的操纵灵巧性则代表了后者的进步。例如,当被问到如何做三明治时,ChatGPT 会在回应中打出一个步骤清单,但是要真正做出三明治,就需要一个灵巧的机器人。同样,研究人员希望物理技能高超的机器人能够将语义智能从互联网这个纯虚拟的世界中带出来,用于真实世界的物理任务上,甚至可能是在我们的家里。
免责声明:以上内容(如有图片或视频亦包括在内)为本站用户上传并发布,本站仅提供信息存储服务。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,如有侵权违规信息请联系删除。






